Instructions for AutoTuner with Ray#
AutoTuner is a “no-human-in-loop” parameter tuning framework for commercial and academic RTL-to-GDS flows. AutoTuner provides a generic interface where users can define parameter configuration as JSON objects. This enables AutoTuner to easily support various tools and flows. AutoTuner also utilizes METRICS2.1 to capture PPA of individual search trials. With the abundant features of METRICS2.1, users can explore various reward functions that steer the flow autotuning to different PPA goals.
AutoTuner provides two main functionalities as follows.
Automatic hyperparameter tuning framework for OpenROAD-flow-script (ORFS)
Parametric sweeping experiments for ORFS
AutoTuner contains top-level Python script for ORFS, each of which implements a different search algorithm. Current supported search algorithms are as follows.
Random/Grid Search
Population Based Training (PBT)
Tree Parzen Estimator (HyperOpt)
Bayesian + Multi-Armed Bandit (AxSearch)
Tree Parzen Estimator + Covariance Matrix Adaptation Evolution Strategy (Optuna)
Evolutionary Algorithm (Nevergrad)
User-defined coefficient values (coeff_perform, coeff_power, coeff_area) of three objectives to set the direction of tuning are written in the script. Each coefficient is expressed as a global variable at the get_ppa function in PPAImprov class in the script (coeff_perform, coeff_power, coeff_area). Efforts to optimize each of the objectives are proportional to the specified coefficients.
Setting up AutoTuner#
We have provided two convenience scripts, ./installer.sh and ./setup.sh
that works in Python3.8 for installation and configuration of AutoTuner,
as shown below:
# Install prerequisites
./tools/AutoTuner/installer.sh
# Start virtual environment
./tools/AutoTuner/setup.sh
Input JSON structure#
Sample JSON file for Sky130HD aes design:
Alternatively, here is a minimal example to get started:
{
"_SDC_FILE_PATH": "constraint.sdc",
"_SDC_CLK_PERIOD": {
"type": "float",
"minmax": [
1.0,
3.7439
],
"step": 0
},
"CORE_MARGIN": {
"type": "int",
"minmax": [
2,
2
],
"step": 0
},
}
"_SDC_FILE_PATH","_SDC_CLK_PERIOD","CORE_MARGIN": Parameter names for sweeping/tuning."type": Parameter type (“float” or “int”) for sweeping/tuning"minmax": Min-to-max range for sweeping/tuning. The unit follows the default value of each technology std cell library."step": Parameter step within the minmax range. Step 0 for type “float” means continuous step for sweeping/tuning. Step 0 for type “int” means the constant parameter.
Tunable / sweepable parameters#
Tables of parameters that can be swept/tuned in technology platforms supported by ORFS. Any variable that can be set from the command line can be used for tune or sweep.
For SDC you can use:
_SDC_FILE_PATHPath relative to the current JSON file to the SDC file.
_SDC_CLK_PERIODDesign clock period. This will create a copy of
_SDC_FILE_PATHand modify the clock period.
_SDC_UNCERTAINTYClock uncertainty. This will create a copy of
_SDC_FILE_PATHand modify the clock uncertainty.
_SDC_IO_DELAYI/O delay. This will create a copy of
_SDC_FILE_PATHand modify the I/O delay.
For Global Routing parameters that are set on fastroute.tcl you can use:
_FR_FILE_PATHPath relative to the current JSON file to the
fastroute.tclfile.
_FR_LAYER_ADJUSTLayer adjustment. This will create a copy of
_FR_FILE_PATHand modify the layer adjustment for all routable layers, i.e., from$MIN_ROUTING_LAYERto$MAX_ROUTING_LAYER.
_FR_LAYER_ADJUST_NAMELayer adjustment for layer NAME. This will create a copy of
_FR_FILE_PATHand modify the layer adjustment only for the layer NAME.
_FR_GR_SEEDGlobal route random seed. This will create a copy of
_FR_FILE_PATHand modify the global route random seed.
How to use#
General Information#
The autotuner.distributed module uses Ray’s job scheduling and management to
fully utilize available hardware resources from a single server
configuration, on-premise or over the cloud with multiple CPUs.
The two modes of operation:
sweep, where every possible parameter combination in the search space is testedtune, where we use Ray’s Tune feature to intelligently search the space and optimize hyperparameters using one of the algorithms listed above.
The sweep mode is useful when we want to isolate or test a single or very few
parameters. On the other hand, tune is more suitable for finding
the best combination of a complex and large number of flow
parameters.
Note
The order of the parameters matter. Arguments --design, --platform and
--config are always required and should precede mode.
Note
The following commands should be run from ./tools/AutoTuner.
Tune only#
Example:
python3 -m autotuner.distributed \
--design gcd \
--platform sky130hd \
--config ../../flow/designs/sky130hd/gcd/autotuner.json \
tune --samples 5
Sweep only#
Example:
python3 -m autotuner.distributed \
--design gcd \
--platform sky130hd \
--config src/autotuner/distributed-sweep-example.json \
sweep
Plot images#
After running an AutoTuner experiment, you can generate a graph to understand the results better. The graph will show the progression of one metric (see list below) over the execution of the experiment.
QoR
Runtime per trial
Clock Period
Worst slack
python3 utils/plot.py --results_dir <your-autotuner-result-path>
Work Directory#
Use --work-dir to specify a writable directory for outputs. This is passed to ORFS as WORK_HOME.
python3 -m autotuner.distributed \
--design gcd \
--platform sky130hd \
--config ../../flow/designs/sky130hd/gcd/autotuner.json \
--work-dir /tmp/autotuner123 \
tune --samples 5
Google Cloud Platform (GCP) distribution with Ray#
GCP Setup Tutorial coming soon.
List of input arguments#
Argument |
Description |
Default |
|---|---|---|
|
Name of the design for Autotuning. |
|
|
Name of the platform for Autotuning. |
|
|
Configuration file that sets which knobs to use for Autotuning. |
|
|
Experiment name. This parameter is used to prefix the FLOW_VARIANT and to set the Ray log destination. |
test |
|
Work directory for outputs (passed to ORFS as WORK_HOME). |
Installation directory |
|
Clean binaries and build files. WARNING: may lose previous data. |
|
|
Force new git clone. WARNING: may lose previous data. |
|
|
Additional git clone arguments. |
|
|
Use latest version of OpenROAD app. |
|
|
OpenROAD app branch to use. |
|
|
OpenROAD-flow-scripts branch to use. |
|
|
OpenROAD-flow-scripts repo URL to use. |
|
|
Additional arguments given to ./build_openroad.sh |
|
|
Number of samples for tuning. |
10 |
|
Max number of concurrent jobs. |
# of CPUs / 2 |
|
Max number of threads usable. |
16 |
|
The address of Ray server to connect. |
|
|
The port of Ray server to connect. |
10001 |
|
Time limit (in hours) for each trial run. |
No limit |
|
Verbosity Level. [0: Only ray status, 1: print stderr, 2: print stdout on top of what is in level 0 and 1. ] |
0 |
Input arguments specific to tune mode#
The following input arguments are applicable for tune mode only.
Argument |
Description |
Default |
|---|---|---|
|
Search algorithm to use for Autotuning. |
hyperopt |
|
Evaluate function to use with search algorithm. |
|
|
Number of iterations for tuning. |
1 |
|
Number of CPUs to request for each tuning job. |
1 |
|
Reference file for use with PPAImprov. |
|
|
Perturbation interval for PopulationBasedTraining |
25 |
|
Random seed. |
42 |
|
Resume previous run. |
|
GUI#
Basically, progress is displayed at the terminal where you run, and when all runs are finished, the results are displayed. You could find the “Best config found” on the screen.
To use TensorBoard GUI, run tensorboard --logdir=./<logpath>. While TensorBoard is running, you can open the webpage http://localhost:6006/ to see the GUI.
We show three different views possible at the end, namely: Table View, Scatter Plot Matrix View and Parallel Coordinate View.
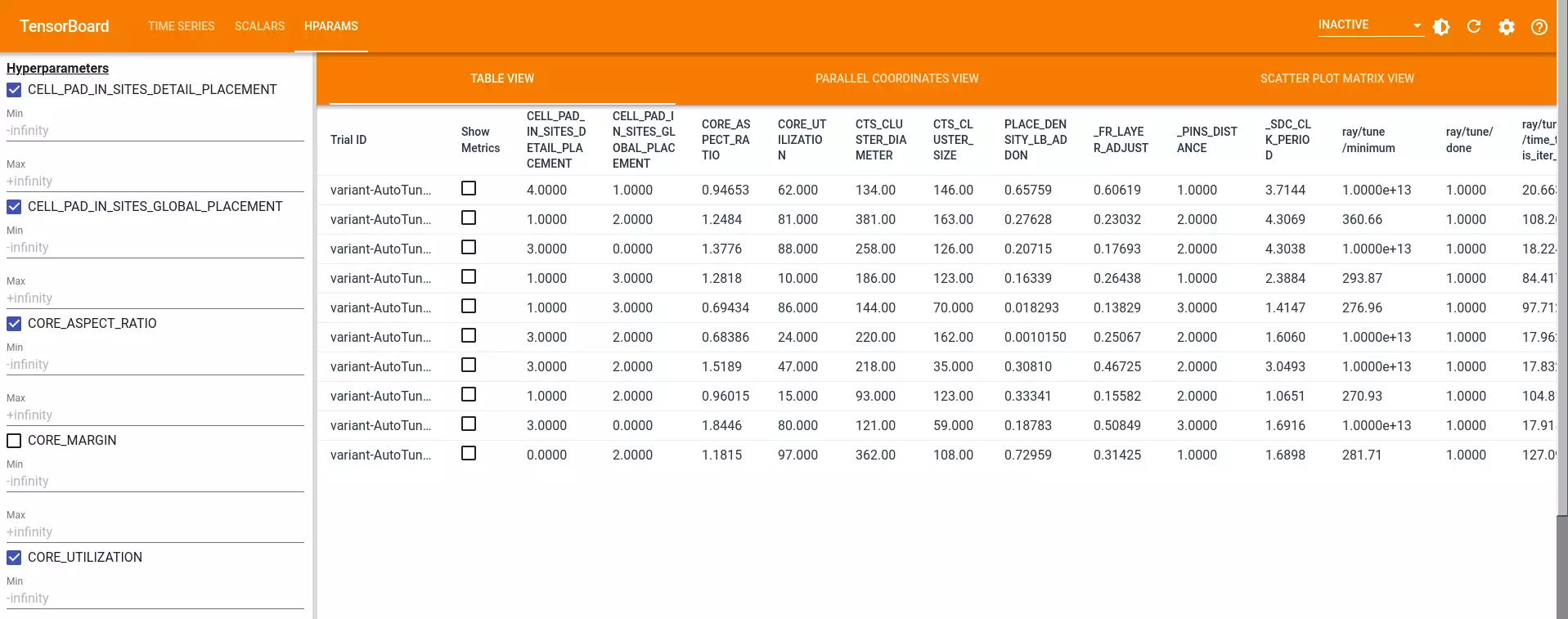
Table View

Scatter Plot Matrix View
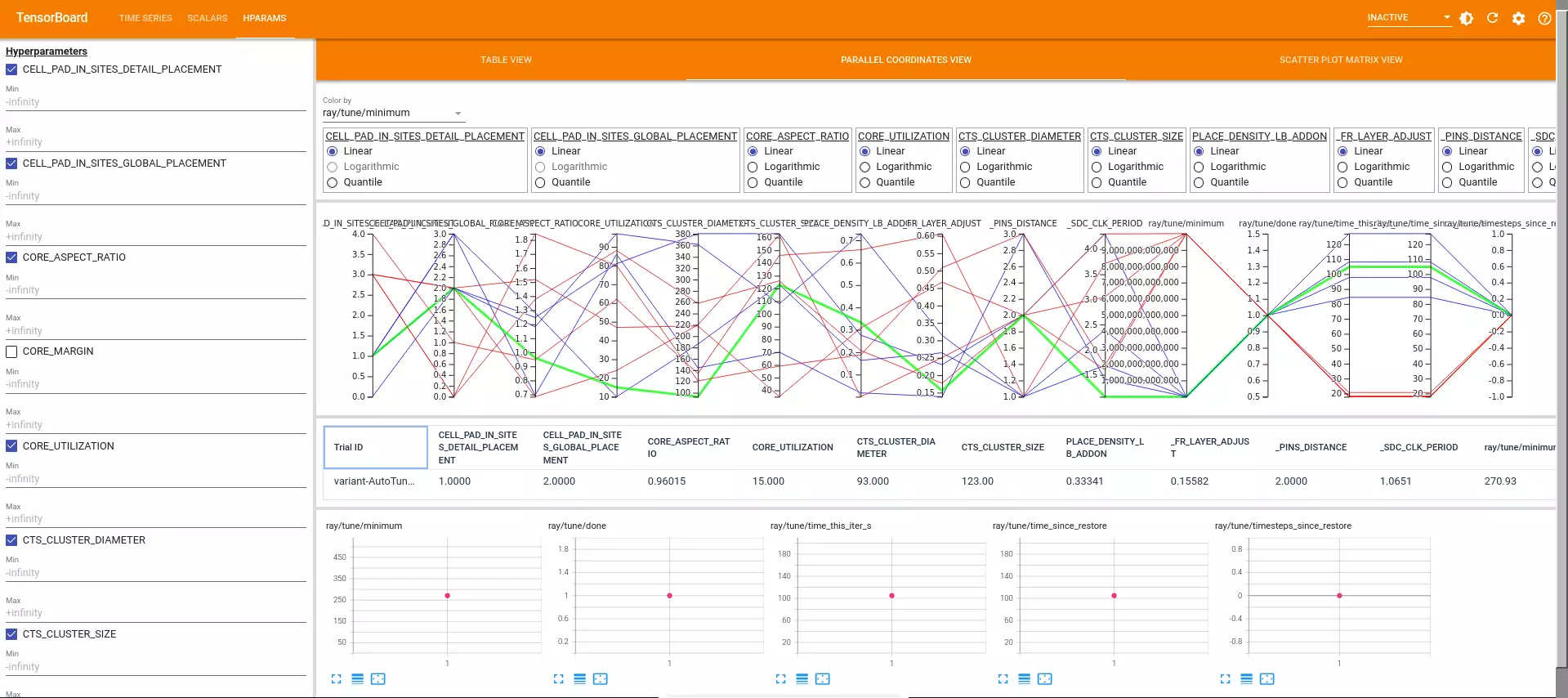
Parallel Coordinate View (best run is in green)
Testing framework#
Assuming the virtual environment is setup at ./tools/AutoTuner/autotuner_env:
./tools/AutoTuner/setup.sh
python3 ./tools/AutoTuner/test/smoke_test_sweep.py
python3 ./tools/AutoTuner/test/smoke_test_tune.py
python3 ./tools/AutoTuner/test/smoke_test_sample_iteration.py
Citation#
Please cite the following paper.
Acknowledgments#
AutoTuner has been developed by UCSD with the OpenROAD Project.